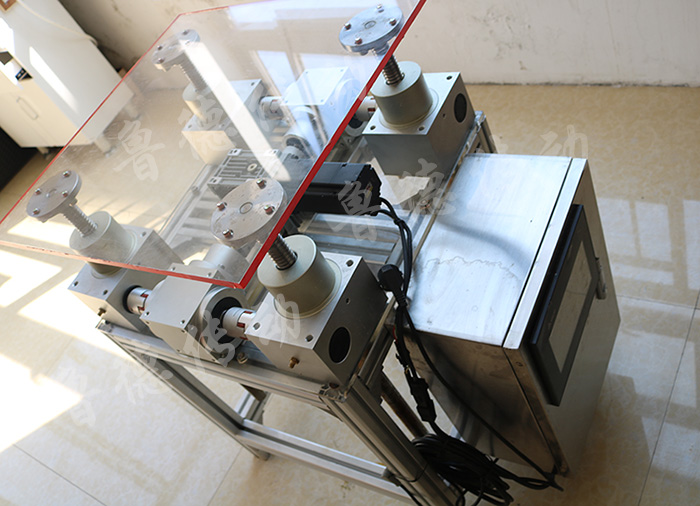
絲杆升降機同步定位(wèi)精度(dù)
絲(sī)杆升降機同步定位精度的控製,一般有電氣控製與機械控製兩種方式。
電氣控製:一般在不能(néng)實現同步軸(zhóu)連(lián)接的(de)情(qíng)況下,通(tōng)過電氣控製來實現同步定位。以絕 對值編碼器以及PLC係統控製來實現同步(bù)定位精度;
機械聯動:通過連杆、聯軸(zhóu)器等組件實現同一驅動源同時控(kòng)製多台升(shēng)降機的工作,在確保各聯動部(bù)件及(jí)配套件間隙消除的情(qíng)況(kuàng)下實現同步定(dìng)位精度。
絲杆聯動平台同步定位(wèi)精度並不要求絕 對的無間(jiān)隙,重要的是間隙的一致性;
絲杆升降機定點定位精度指單(dān)台或多台(tái)多次往複運動後的定點定位精度。重複定位精度不但要求(qiú)所有(yǒu)部件的間隙一致,並要求各部件間隙的zui小值追求無間隙。
絲杆升降機定位精度" width="700" height="506" />






好!")
圍(wéi)欄式回轉(zhuǎn)減速機,回轉減速(sù)機,蝸輪蝸杆-WE重載圍(wéi)欄式回轉減速機")
德F係列減速機,F減(jiǎn)速機,斜齒輪減速機-F 係列平(píng)行軸斜齒輪減速機")
德減速機,二次包絡,蝸輪蝸杆減速機-C係列平麵二次包絡蝸輪蝸杆減速機 _從我開始!")
機-PV直角精密行(háng)星齒輪減速機 形式多樣非標定製(zhì)")
動缸,伺服電缸-伺服電動缸")
推杆,小型電動推杆,直線電動推杆-電動推杆")
杆升降機,絲杠升降機,升降機-絲杆升降機")
絲(sī)杆升降機(jī),錐齒輪滾珠絲杆(gǎn)升降機-傘齒輪絲杆升降(jiàng)機")
德錐齒輪轉向箱,轉向箱,螺旋錐齒輪換(huàn)向器-傘齒(chǐ)輪轉(zhuǎn)向箱")
杠電動推(tuī)杆-升降機推杆")
